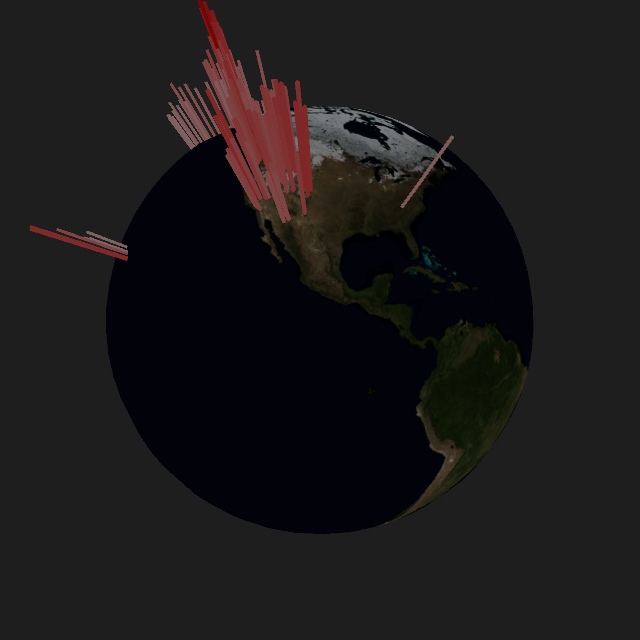
ultra_map.pde
PVector camera_angle;
Table table;
float r = 200;
int max_elevation = 0;
int min_elevation = 0;
PImage earth;
PShape globe;
Table convertRawTable(String file_name, String optional_flags) {
Table new_table = new Table();
new_table.addColumn("name", Table.STRING);
new_table.addColumn("elevation", Table.INT);
new_table.addColumn("latitude", Table.FLOAT);
new_table.addColumn("longitude", Table.FLOAT);
Table raw_table = loadTable(file_name, optional_flags);
println(raw_table.getRowCount() +" total rows in "+ file_name);
for(TableRow row : raw_table.rows()) {
String raw_lat = row.getString("latitude");
String lat_which = raw_lat.substring(0, 1);
float lat_val = abs(float(raw_lat.substring(1)));
if(lat_which.equals("S")) {
lat_val *= -1.0;
}
String raw_lon = row.getString("longitude");
String lon_which = raw_lon.substring(0, 1);
float lon_val = abs(float(raw_lon.substring(1)));
if(lon_which.equals("W")) {
lon_val *= -1.0;
}
//println(row.getString("name") +" ("+ row.getInt("elevation") +"ft): "+ lat_which +":"+ lat_val +" "+ lon_which +":"+ lon_val);
TableRow newRow = new_table.addRow();
newRow.setString("name", row.getString("name"));
newRow.setInt("elevation", row.getInt("elevation"));
newRow.setFloat("latitude", lat_val);
newRow.setFloat("longitude", lon_val);
}
return new_table;
}
void setup() {
// load assets
earth = loadImage("data/earth.jpg");
table = convertRawTable("data/ultras.csv", "header, csv");
size(640, 640, P3D);
camera_angle = new PVector(-180.0, 0.0);
// find min and max elevations
for(TableRow row : table.rows()) {
int elev = row.getInt("elevation");
if(elev > max_elevation) {
max_elevation = elev;
}
if((min_elevation == 0) || (elev < min_elevation)) {
min_elevation = elev;
}
}
//println("elevation between: "+ min_elevation +" & "+ max_elevation);
noStroke();
globe = createShape(SPHERE, r);
//globe.rotateY(radians(180));
globe.setTexture(earth);
}
void draw() {
background(30);
translate((width / 2), (height / 2));
rotateY(radians(camera_angle.x));
rotateX(radians(camera_angle.y));
float r = 200;
lights();
fill(200);
noStroke();
//sphere(r);
// -2704
shape(globe);
for(TableRow row : table.rows()) {
int elev = row.getInt("elevation");
float lat = row.getFloat("latitude");
float lon = row.getFloat("longitude");
float theta = radians(lat) + PI/2;
float phi = radians(-lon) + PI;
float x = (r * sin(theta) * cos(phi));
float y = (r * cos(theta));
float z = (r * sin(theta) * sin(phi));
pushStyle();
pushMatrix();
ambient(lerpColor(
color(255, 255, 255),
color(255, 0, 0),
map(elev, min_elevation, max_elevation, 0, 1)
));
PVector pos = new PVector(x, y, z);
float h = map(elev, min_elevation, max_elevation, 20.0, 200.0);
PVector xaxis = new PVector(1, 0, 0);
float angleb = PVector.angleBetween(xaxis, pos);
PVector raxis = xaxis.cross(pos);
translate(x, y, z);
rotate(angleb, raxis.x, raxis.y, raxis.z);
box(h, 2, 2);
popMatrix();
popStyle();
}
if(frameCount == 50) { save("preview.png"); }
}
void mouseDragged() {
camera_angle.add(
((mouseX - pmouseX) * 0.5),
((mouseY - pmouseY) * 0.5)
);
}