Art›A Star
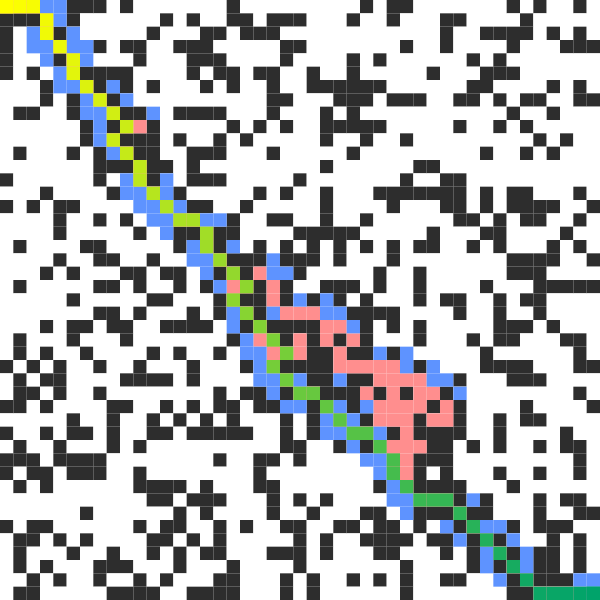
A* Pathfinding Algorithm
This project is powered by p5.js and originates from this A* Pathfinding tutorial. This version generates a new map one second after the last map finishes.

Interactive A* Pathfinding
There is also an example for testing the A* algorithm against a live drawing.

index-draw.html
<!doctype html>
<html>
<head>
<meta charset="utf-8" />
<meta http-equiv="X-UA-Compatible" content="IE=edge" />
<meta name="viewport" content="width=device-width, initial-scale=1.0, maximum-scale=1.0, user-scalable=0" />
<title>p5.js - A* Pathfinding (with drawing tool)</title>
<script src="lib/p5.min.js"></script>
<!-- <script src="lib/p5.dom.min.js"></script> -->
<!-- <script src="lib/p5.sound.min.js"></script> -->
<script src="sketch-draw.js"></script>
</head>
<body>
<p><button id="start">Start</button> | <button id="restart">Restart</button></p>
</body>
</html>index.html
<!doctype html>
<html>
<head>
<meta charset="utf-8" />
<meta http-equiv="X-UA-Compatible" content="IE=edge" />
<meta name="viewport" content="width=device-width, initial-scale=1.0, maximum-scale=1.0, user-scalable=0" />
<title>p5.js - A* Pathfinding</title>
<script src="lib/p5.min.js"></script>
<!-- <script src="lib/p5.dom.min.js"></script> -->
<!-- <script src="lib/p5.sound.min.js"></script> -->
<script src="sketch.js"></script>
</head>
<body>
</body>
</html>sketch-draw.js
let cols = 45;
let rows = 45;
let grid = [];
let openSet = [];
let closedSet = [];
let start;
let end;
let w, h;
let path = [];
let do_diagonal = true;
let grid_spawn_rate = 0.3;
let is_drawing = true;
let found_path = false;
window.addEventListener('load', function() {
document.getElementById("start").addEventListener("click", function() {
generateBoard();
is_drawing = false;
loop();
});
document.getElementById("restart").addEventListener("click", function() {
is_drawing = true;
for(let i = 0; i < cols; i++) {
for(let j = 0; j < rows; j++) {
grid[i][j].wall = false;
}
}
loop();
});
}, false);
function buildGrid() {
// 2d array + create spots
for(let i = 0; i < cols; i++) {
grid[ i ] = [];
for(let j = 0; j < rows; j++) {
grid[ i ][ j ] = new Spot(i, j);
}
}
// set neighbors
for(let i = 0; i < cols; i++) {
for(let j = 0; j < rows; j++) {
grid[ i ][ j ].addNeighbors(grid);
}
}
//// random start+end:
//start = grid[ Math.round(random(0, (cols - 1))) ][ Math.round(random(0, (rows - 1))) ];
//end = grid[ Math.round(random(0, (cols - 1))) ][ Math.round(random(0, (rows - 1))) ];
// corners start+end:
start = grid[0][0];
end = grid[(cols - 1)][(rows - 1)];
}
function generateBoard() {
// reset global variables
openSet = [];
closedSet = [];
path = [];
found_path = false;
// make sure start and end aren't walls
start.wall = false;
end.wall = false;
openSet.push(start);
loop();
}
function removeFromArray(arr, elt) {
for(let i = (arr.length - 1); i >= 0; i--) {
if(arr[ i ] == elt) {
arr.splice(i, 1);
}
}
}
function heuristic(a, b) {
// euclidean distance
let d = dist(a.i, a.j, b.i, b.j);
// manhattan distance
//let d = abs( a.i - b.i ) + abs( a.j - b.j );
return d;
}
function spotAtXY(x, y) {
let i = Math.floor( (x / w) );
let j = Math.floor( (y / h) );
if(grid[ i ]) {
if(grid[ i ][ j ]) {
return grid[ i ][ j ];
}
}
return false;
}
function Spot(i, j) {
this.i = i;
this.j = j;
this.f = 0;
this.g = 0;
this.h = 0;
this.neighbors = [];
this.previous = undefined;
this.wall = false;
//if(random(1) < grid_spawn_rate) {
// this.wall = true;
//}
this.show = function(col) {
noStroke();
if(is_drawing && !this.wall) {
stroke(200, 200, 200);
}
//stroke(col);
fill(col);
if(this.wall) {
//stroke(45, 45, 45);
fill(45, 45, 45);
}
//rect((this.i * w), (this.j * h), (w - 1), (h - 1));
rect((this.i * w), (this.j * h), w, h);
};
this.addNeighbors = function(grid) {
let i = this.i;
let j = this.j;
// left
if(i < (cols - 1)) {
this.neighbors.push(grid[ i + 1 ][ j ]);
}
// right
if(i > 0) {
this.neighbors.push(grid[ i - 1 ][ j ]);
}
// above
if(j < (rows - 1)) {
this.neighbors.push(grid[ i ][ j + 1 ]);
}
// below
if(j > 0) {
this.neighbors.push(grid[ i ][ j - 1 ]);
}
if(do_diagonal) {
// diag top left
if((i > 0) && (j > 0)) {
this.neighbors.push(grid[ i - 1 ][ j - 1 ]);
}
// diag top right
if((i < (cols - 1)) && (j > 0)) {
this.neighbors.push(grid[ i + 1 ][ j - 1 ]);
}
// diag bottom left
if((i > 0) && (j < (rows - 1))) {
this.neighbors.push(grid[ i - 1 ][ j + 1 ]);
}
// diag bottom right
if((i < (cols - 1)) && (j < (cols - 1))) {
this.neighbors.push(grid[ i + 1 ][ j + 1 ]);
}
}
};
}
function setup() {
createCanvas(600, 600);
w = (width / cols);
h = (height / rows);
//generateNewBoard();
buildGrid();
}
function draw() {
var current;
if(!is_drawing) {
let won_this_round = false;
if(openSet.length > 0) {
// keep going
let winner = 0;
for(let i = 0; i < openSet.length; i++) {
if(openSet[ i ].f < openSet[ winner ].f) {
winner = i;
}
}
current = openSet[ winner ];
if(current === end) {
noLoop();
//console.log("Found solution!");
//// start new board
//window.setTimeout(function() {
// generateNewBoard();
//}, 1000);
won_this_round = true;
found_path = true;
}
if(!won_this_round) {
removeFromArray(openSet, current);
closedSet.push(current);
let neighbors = current.neighbors;
for(let i = 0; i < neighbors.length; i++) {
let neighbor = neighbors[ i ];
if(!closedSet.includes(neighbor) && !neighbor.wall) {
let tempG = current.g + 1;
let newPath = false;
if(openSet.includes(neighbor)) {
if(tempG < neighbor.g) {
neighbor.g = tempG;
newPath = true;
}
} else {
neighbor.g = tempG;
newPath = true;
openSet.push(neighbor);
}
if(newPath) {
neighbor.h = heuristic(neighbor, end);
neighbor.f = (neighbor.g + neighbor.h);
neighbor.previous = current;
}
}
}
}
} else {
// no solution
noLoop();
//console.log("No solution!");
//// start new board
//window.setTimeout(function() {
// generateNewBoard();
//}, 1000);
return;
}
}
background(255);
for(let i = 0; i < cols; i++) {
for(let j = 0; j < cols; j++) {
grid[ i ][ j ].show(color(255));
}
}
if(!is_drawing) {
for(let i = 0; i < closedSet.length; i++) {
closedSet[ i ].show(color(255, 142, 142));
}
for(let i = 0; i < openSet.length; i++) {
openSet[ i ].show(color(94, 147, 255));
//openSet[ i ].show(color(188, 150, 255));
}
}
let start_color = color(255, 255, 0);
let end_color = color(0, 163, 106);
if(!is_drawing) {
// draw the current best path
path = [];
let temp = current;
path.push(temp);
while(temp.previous) {
path.push(temp.previous);
temp = temp.previous;
}
let dist_startEnd = dist(start.i, start.j, end.i, end.j);
for(let i = 0; i < path.length; i++) {
let dist_startPathPoint = dist(start.i, start.j, path[ i ].i, path[ i ].j);
//if(found_path) {
//path[ i ].show(color(0, 0, 255));
path[ i ].show(lerpColor(start_color, end_color, (dist_startPathPoint / dist_startEnd)));
//} else {
// path[ i ].show(color(107, 187, 244));
//}
}
}
// draw start + end
start.show(start_color);
end.show(end_color);
}
function mouseDragged() {
if(!is_drawing) {
return;
}
let grid_item = spotAtXY(mouseX, mouseY);
if(false !== grid_item) {
if(grid_item === start || grid_item === end) {
//console.log("can't draw on this point");
} else {
grid_item.wall = true;
}
}
}
sketch.js
let iter = 0;
let cols = 45;
let rows = 45;
let grid;
let openSet;
let closedSet;
let start;
let end;
let w, h;
let path;
let do_diagonal = true;
let grid_spawn_rate = 0.35;
let found_path = false;
function generateNewBoard() {
// reset global variables
grid = [];
openSet = [];
closedSet = [];
path = [];
found_path = false;
// 2d array + create spots
for(let i = 0; i < cols; i++) {
grid[ i ] = [];
for(let j = 0; j < rows; j++) {
grid[ i ][ j ] = new Spot(i, j);
}
}
// set neighbors
for(let i = 0; i < cols; i++) {
for(let j = 0; j < rows; j++) {
grid[ i ][ j ].addNeighbors(grid);
}
}
//// random start+end:
//start = grid[ Math.round(random(0, (cols - 1))) ][ Math.round(random(0, (rows - 1))) ];
//end = grid[ Math.round(random(0, (cols - 1))) ][ Math.round(random(0, (rows - 1))) ];
// corners start+end:
start = grid[0][0];
end = grid[(cols - 1)][(rows - 1)];
// make sure start and end aren't walls
start.wall = false;
end.wall = false;
openSet.push(start);
iter++;
loop();
}
function removeFromArray(arr, elt) {
for(let i = (arr.length - 1); i >= 0; i--) {
if(arr[ i ] == elt) {
arr.splice(i, 1);
}
}
}
function heuristic(a, b) {
// euclidean distance
let d = dist(a.i, a.j, b.i, b.j);
// manhattan distance
//let d = abs( a.i - b.i ) + abs( a.j - b.j );
return d;
}
function Spot(i, j) {
this.i = i;
this.j = j;
this.f = 0;
this.g = 0;
this.h = 0;
this.neighbors = [];
this.previous = undefined;
this.wall = false;
if(random(1) < grid_spawn_rate) {
this.wall = true;
}
this.show = function(col) {
noStroke();
//stroke(col);
fill(col);
if(this.wall) {
//stroke(45, 45, 45);
fill(45, 45, 45);
}
//rect((this.i * w), (this.j * h), (w - 1), (h - 1));
rect((this.i * w), (this.j * h), w, h);
};
this.addNeighbors = function(grid) {
let i = this.i;
let j = this.j;
// left
if(i < (cols - 1)) {
this.neighbors.push(grid[ i + 1 ][ j ]);
}
// right
if(i > 0) {
this.neighbors.push(grid[ i - 1 ][ j ]);
}
// above
if(j < (rows - 1)) {
this.neighbors.push(grid[ i ][ j + 1 ]);
}
// below
if(j > 0) {
this.neighbors.push(grid[ i ][ j - 1 ]);
}
if(do_diagonal) {
// diag top left
if((i > 0) && (j > 0)) {
this.neighbors.push(grid[ i - 1 ][ j - 1 ]);
}
// diag top right
if((i < (cols - 1)) && (j > 0)) {
this.neighbors.push(grid[ i + 1 ][ j - 1 ]);
}
// diag bottom left
if((i > 0) && (j < (rows - 1))) {
this.neighbors.push(grid[ i - 1 ][ j + 1 ]);
}
// diag bottom right
if((i < (cols - 1)) && (j < (cols - 1))) {
this.neighbors.push(grid[ i + 1 ][ j + 1 ]);
}
}
};
}
function setup() {
createCanvas(600, 600);
w = (width / cols);
h = (height / rows);
generateNewBoard();
}
function draw() {
var current;
let solved_this_round = false;
if(openSet.length > 0) {
// keep going
let winner = 0;
for(let i = 0; i < openSet.length; i++) {
if(openSet[ i ].f < openSet[ winner ].f) {
winner = i;
}
}
current = openSet[ winner ];
if(current === end) {
noLoop();
//console.log("Iteration #"+ iter +": Found solution!");
// start new board
window.setTimeout(function() {
generateNewBoard();
}, 1000);
solved_this_round = true;
found_path = true;
}
if(!solved_this_round) {
removeFromArray(openSet, current);
closedSet.push(current);
let neighbors = current.neighbors;
for(let i = 0; i < neighbors.length; i++) {
let neighbor = neighbors[ i ];
if(!closedSet.includes(neighbor) && !neighbor.wall) {
let tempG = current.g + 1;
let newPath = false;
if(openSet.includes(neighbor)) {
if(tempG < neighbor.g) {
neighbor.g = tempG;
newPath = true;
}
} else {
neighbor.g = tempG;
newPath = true;
openSet.push(neighbor);
}
if(newPath) {
neighbor.h = heuristic(neighbor, end);
neighbor.f = (neighbor.g + neighbor.h);
neighbor.previous = current;
}
}
}
}
} else {
// no solution
noLoop();
//console.log("Iteration #"+ iter +": No solution!");
// start new board
window.setTimeout(function() {
generateNewBoard();
}, 1000);
return;
}
background(255);
for(let i = 0; i < cols; i++) {
for(let j = 0; j < cols; j++) {
grid[ i ][ j ].show(color(255));
}
}
for(let i = 0; i < closedSet.length; i++) {
closedSet[ i ].show(color(255, 142, 142));
}
for(let i = 0; i < openSet.length; i++) {
openSet[ i ].show(color(94, 147, 255));
}
// draw the current best path
path = [];
let temp = current;
path.push(temp);
while(temp.previous) {
path.push(temp.previous);
temp = temp.previous;
}
let start_color = color(255, 255, 0);
let end_color = color(0, 163, 106);
let dist_startEnd = dist(start.i, start.j, end.i, end.j);
for(let i = 0; i < path.length; i++) {
let dist_startPathPoint = dist(start.i, start.j, path[ i ].i, path[ i ].j);
path[ i ].show(lerpColor(start_color, end_color, (dist_startPathPoint / dist_startEnd)));
}
// draw start + end
start.show(start_color);
end.show(end_color);
}